İçindekiler
1. Matematiksel Modeller, Kestirim ve Yönelim Kontrol Algoritmaları
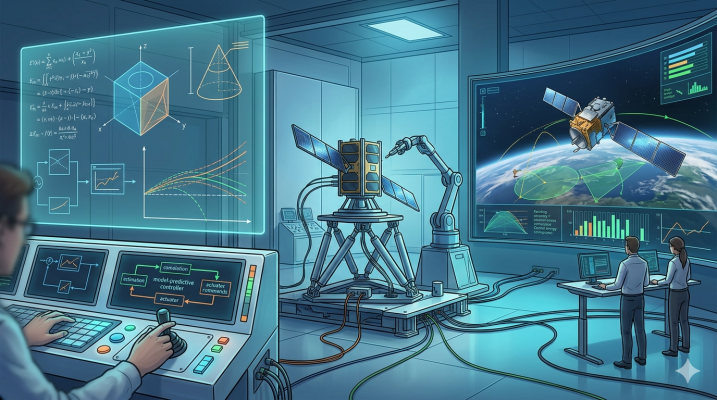
Uyduyu istenilen yöne çevirmek için sensörlerden gelen veriler, uydunun matematiksel modelleri üzerinden işlenir ve eyleyicilere komut olarak gönderilir. Bu süreç üç temel yapı taşına dayanır:
1. Uydu Kinematiği Kinematik, kuvvetleri ve kütleyi hesaba katmadan uydunun sadece hareketinin geometrisini tanımlar. Uydunun anlık olarak uzayda nereye baktığını (yönelimini) matematiksel olarak ifade etmek için kullanılır. Genellikle anlaşılması kolay olan Euler Açıları (Roll, Pitch, Yaw) veya matematiksel olarak daha güvenilir olan Kuaterniyonlar kullanılarak hesaplanır.
2. Uydu Dinamiği Dinamik, uydunun kütlesini, eylemsizliğini ve ona etki eden kuvvetleri ve torkları inceler. Uzaydaki bozucu etkiler (Güneş radyasyonu basıncı, manyetik alan, yerçekimi değişimleri vb.) ve eyleyicilerin ürettiği dönüş kuvvetleri dinamiğin konusudur. Uydunun uygulanan bir torka nasıl fiziksel bir tepki vereceği Newton ve Euler yasaları ile modellenir.
3. Temel Kontrolcüler Kinematik ve dinamik sistemler modellendikten sonra, hedef ile mevcut durum arasındaki hatayı gidermek için kontrolcüler devreye girer. En temel ve yaygın yöntem PID (Oransal-İntegral-Türevsel) kontrolüdür. Kontrolcü, hata payını sürekli hesaplayarak uydunun istenen yönde sabit kalabilmesi için eyleyicilere tam olarak ne kadar güç verilmesi gerektiğini belirler.
Devam Eden Araştırmalar ve Geleceğin Kontrol Sistemleri Temel kontrolcüler standart görevler için yeterli olsa da, uzay görevleri giderek zorlaşmaktadır. Günümüzde amaçlanan şey; çok daha az enerji/yakıt tüketen, çok daha hızlı manevra yapabilen, dış uzayın bilinmeyen bozucu etkilerine ve uydu içindeki olası donanım arızalarına karşı sistemin çökmesini engelleyecek (dayanıklı/robust ve adaptif) sistemler geliştirmektir.
Bu hedeflere ulaşmak için Yapay Zeka, Bulanık Mantık ve Adaptif Kontrol gibi yöntemler kullanılarak halen birçok kontrol çalışması devam etmektedir.
2. Yeryüzü Doğrulama Testleri ve Simülasyon Altyapıları
Bir uzay aracının ADCS yazılımı ve donanımının uzaya fırlatılmadan önce yeryüzünde doğrulanması, görev başarı ihtimalini garanti altına almak için çok önemlidir. Uzayda, istisnai durumlar haricinde (Hubble bakım görevleri gibi), bir donanım değişimi veya fiziksel onarım çok zordur. Bu bağlamda, uydunun bilgisayarlarını, sensörlerini ve eyleyicilerini test etmek için uzaydaymış hissini veren Donanım Çevrimli Testler (Hardware-in-the-Loop – HITL) geliştirilmiştir [A review paper: The dynamics, kinematics, design and control of satellite simulators with spherical air bearing]
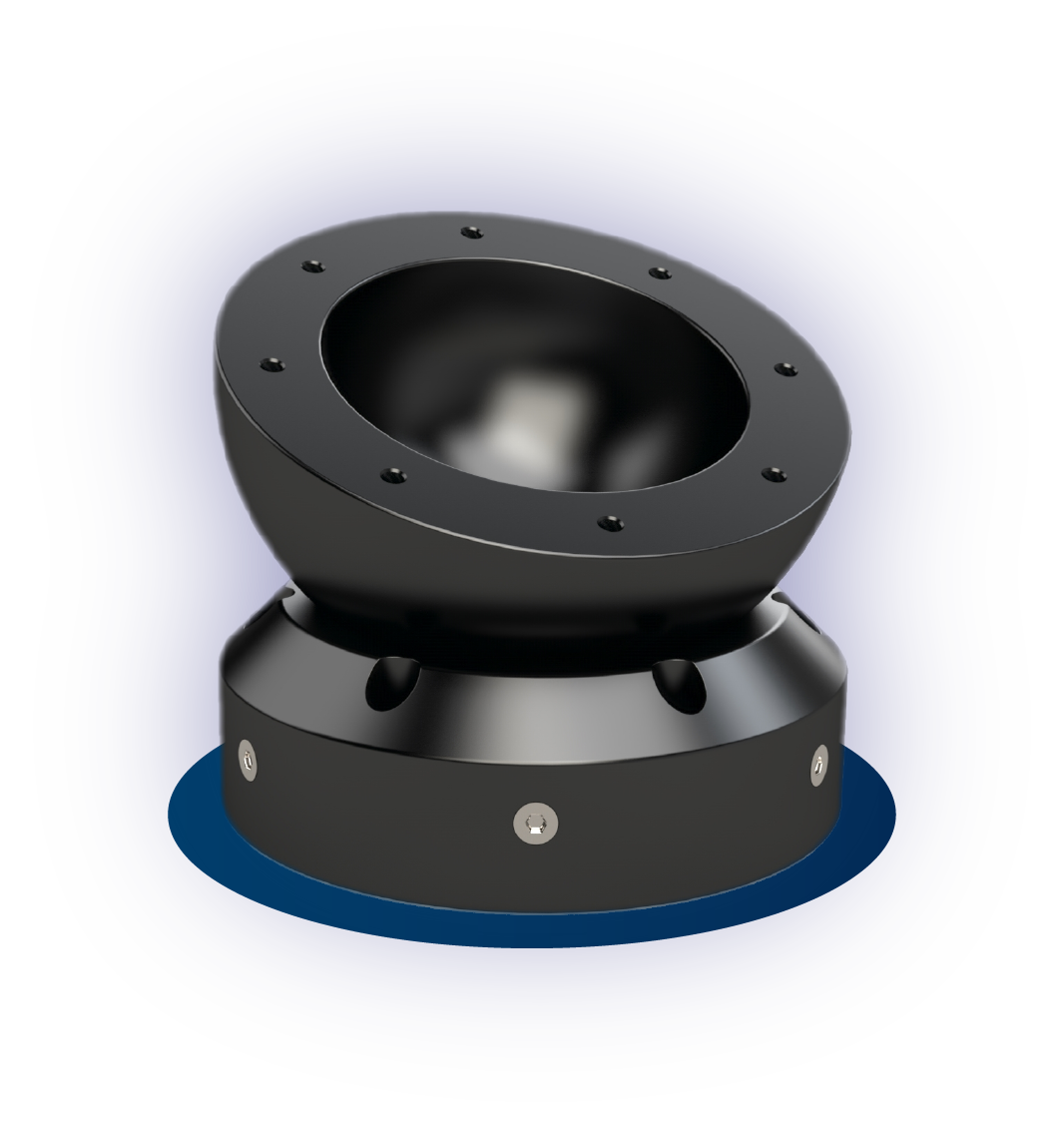
2.1. Küresel Hava Yatakları (Spherical Air Bearings)
Uzay ortamının sürtünmesizliğini ve mikro-yerçekimi (micro-gravity) koşullarını Dünya’da yaratabilmenin mühendislikteki en sofistike çözümü Küresel Hava Yatağı sistemleridir. Yüksek basınçlı bir havanın incecik bir film tabakası oluşturduğu yarı-küresel bir yatak üzerinde yüzen platformlar, üzerlerine yerleştirilen uydulara neredeyse sıfır sürtünmeyle dönme imkanı sağlar. Küresel hava yatakları, Z ekseninde 360 derecelik (kısıtlamasız), X ve Y eksenlerinde ise +-15 derecelik 3 Serbestlik Dereceli (3-DOF) tam yönelim kontrol testlerine olanak tanır.
Bu testlerin kritik aşaması, platformun kütle merkezinin (Center of Mass) dönüş merkeziyle çok hassas bir seviyesinde hizalanmasıdır. Dünya’nın devasa yerçekimi altında, bu iki merkezin en ciddi şekilde sapması (offset), uzayda var olmayan çok güçlü bir sahte yerçekimi sarkacı torku (parasitic gravitational torque) yaratarak testin geçersiz olmasına neden olur. Bu hizalamayı sağlamak için lineer kayabilen kütle dengeleme sistemleri kullanılır.
Uzay Şartlarını Laboratuvarınıza Taşıyın
Okumakta olduğunuz yeryüzü doğrulama konseptlerini fiziksel bir teste dönüştürün. Yüksek hassasiyetli SPACROL Küresel Hava Yatağı (Spherical Air Bearing) sistemlerimiz, uydularınızın yönelim kontrol algoritmalarını sürtünmesiz ortamda doğrulamanızı sağlar.
Uzay ortamının sürtünmesizliğini ve mikro-yerçekimi (micro-gravity) koşullarını Dünya’da yaratabilmenin mühendislikteki en sofistike çözümü Küresel Hava Yatağı sistemleridir. Yüksek basınçlı bir havanın incecik bir film tabakası oluşturduğu yarı-küresel bir yatak üzerinde yüzen platformlar, üzerlerine yerleştirilen uydulara neredeyse sıfır sürtünmeyle dönme imkanı sağlar. Küresel hava yatakları, Z ekseninde 360 derecelik (kısıtlamasız), X ve Y eksenlerinde ise +-15 derecelik 3 Serbestlik Dereceli (3-DOF) tam yönelim kontrol testlerine olanak tanır. Bu testlerin kritik aşaması, platformun kütle merkezinin (Center of Mass) dönüş merkeziyle çok hassas bir seviyesinde hizalanmasıdır. Dünya’nın devasa yerçekimi altında, bu iki merkezin en ciddi şekilde sapması (offset), uzayda var olmayan çok güçlü bir sahte yerçekimi sarkacı torku (parasitic gravitational torque) yaratarak testin geçersiz olmasına neden olur. Bu hizalamayı sağlamak için lineer kayabilen kütle dengeleme sistemleri kullanılır.
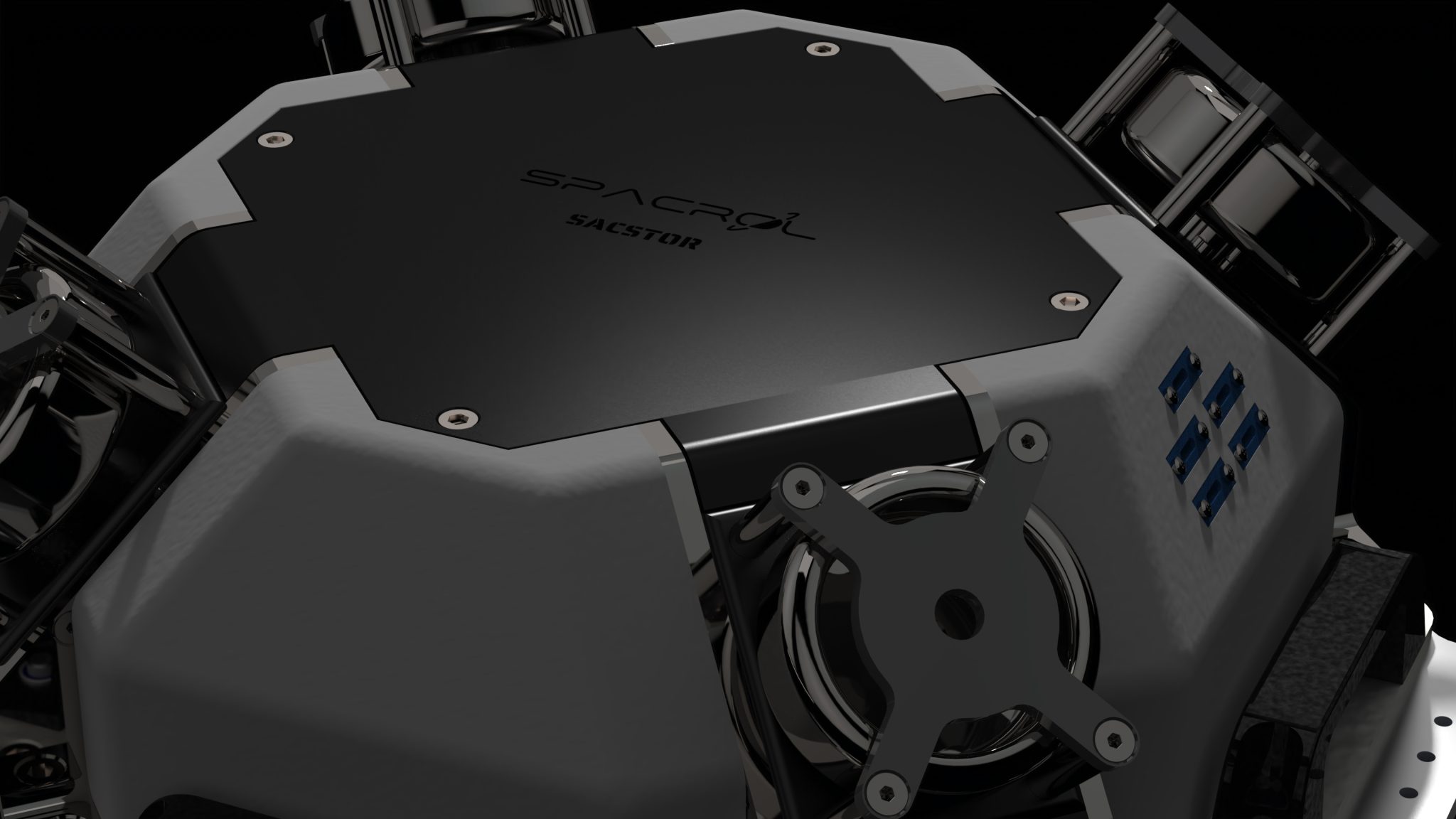
Bu kapsamda SPACROL tarafından geliştirilen SACSTOR ürünü, yazılım simülasyonları ile yörünge gerçekliği arasındaki boşluğu dolduran, Hardware-in-the-loop (HIL) yeteneğine sahip ileri teknoloji bir uydu yönelim kontrol simülatörüdür. TÜBİTAK desteğiyle hayata geçirilen bu yenilikçi sistem, faydalı yükü mikroskobik bir basınçlı hava katmanı üzerinde yüzdürerek mekanik sürtünmeyi neredeyse ortadan kaldırır ve çok küçük torkların dahi ölçülebilmesini sağlar. Cihaza entegre edilen yüksek hassasiyetli kütle dengeleme mekanizmaları sayesinde uydunun ağırlık merkezi kusursuz bir şekilde hizalanarak, yerçekimi kaynaklı sahte torklar neredeyse sıfırlanır. 1600 N küresel hava yatağı kapasitesine sahip olan ve 1 derecenin altındaki yönelim hassasiyetiyle çalışan SACSTOR, fırlatma öncesinde özellikle 3U ve 6U Küp Uydu (CubeSat) mimarilerinin test edilerek görev risklerinin en aza indirilmesi için kusursuz bir ortam sunmaktadır.
Sistemi standart test altyapılarından ayıran en kritik mühendislik avantajı, özelleştirilebilir eyleyici mimarisidir. SACSTOR, aktif 3 eksenli yönelim kontrolünü kendi üzerindeki 4 adet piramit yapılı tepki tekerlekleri (reaction wheels) ile gerçekleştirmektedir. Bu yapı, istenildiği takdirde siparişe özel olarak tasarım değişikliği ile de üretilebilmektedir. Üzerinde barındırdığı çift IMU sensörü, yüksek kapasiteli batarya altyapısı (121 Wh) ve kablosuz haberleşme donanımlarıyla; geliştirilen algoritmaların yeryüzünde güvenle test edilmesini sağlar. SACSTOR, dış bozucu torklara ve donanım arızalarına karşı geliştirilen kontrol algoritmalarının kapalı çevrim testlerinde mühendisler için vazgeçilmez bir doğrulama ve kalibrasyon platformudur.
Eksiksiz Donanım Döngüde (HIL) Uydu Simülasyonu
Uydularınızın uzaydaki dinamik davranışlarını yeryüzünde gerçeğe en yakın şekilde deneyimleyin. SPACROL SACSTOR Uydu Yönelim Simülatörü; yönelim belirleme ve kontrol (ADCS) alt sistemlerinizi, eyleyicilerinizi ve algoritmalarınızı entegre bir laboratuvar ortamında test etmenizi sağlayan stratejik bir yeryüzü doğrulama altyapısı sunar.
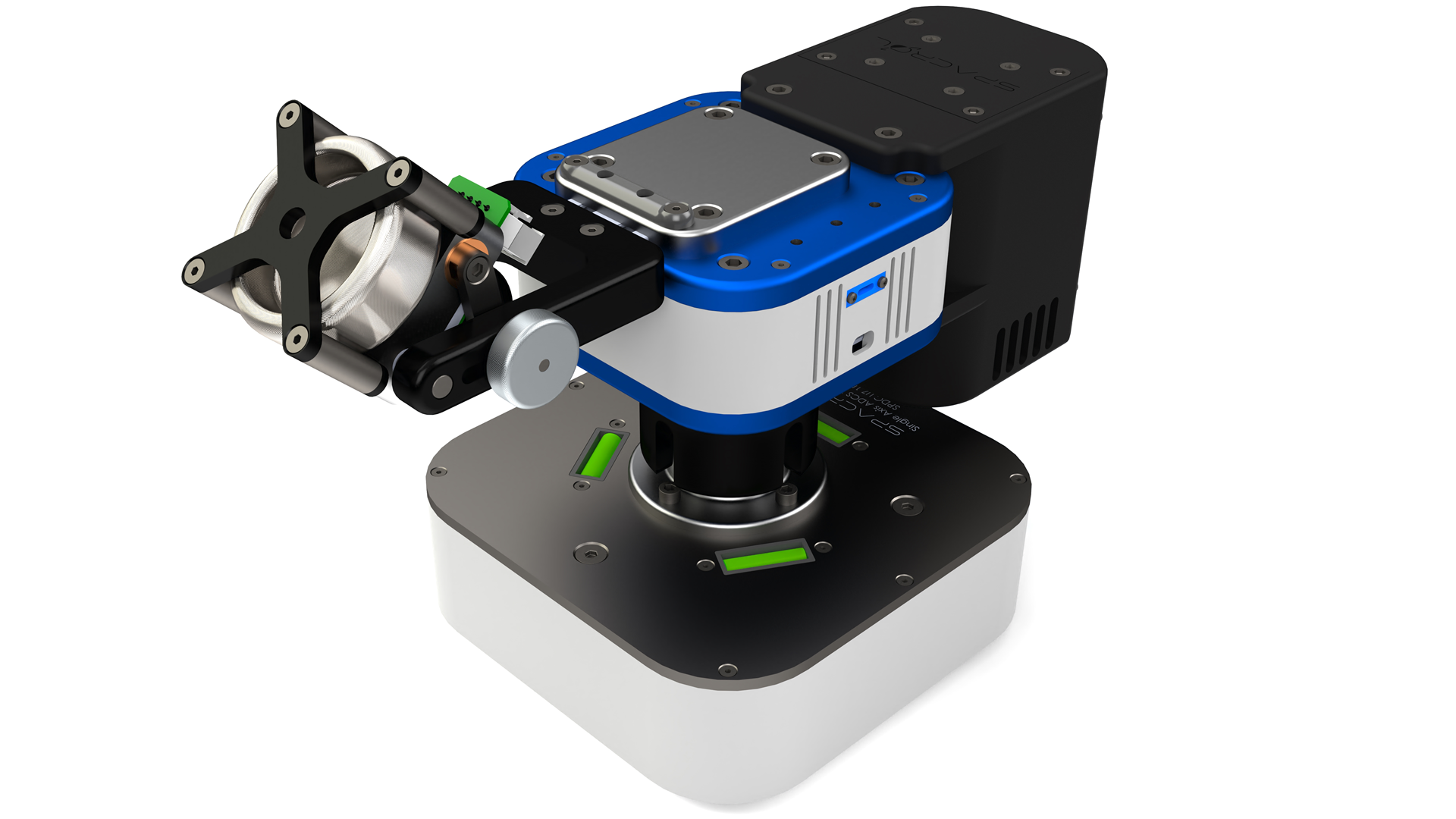
Öte yandan, her test platformu 3 eksenli olmak zorunda değildir. SPACROL’un diğer bir ürünü olan 1D4T: Tek Eksen Yönelim Kontrol Test Sistemi, karmaşık kütle dengeleme problemlerini basitleştirmek ve sadece Sapma / Yönelme (Yaw) dönüş algoritmalarına odaklanmak amacıyla, sadece Z ekseninde dönmeye izin veren 1 Serbestlik Dereceli (1-DOF) maliyet etkin bir deneysel cihaz olarak geliştirilmiştir. “1 Sistem, 4 Test” vizyonuyla ortaya çıkan bu platform; yalnızca standart yönelim belirleme (ADCS) senaryolarını değil, aynı zamanda yüksek çözünürlüklü DC motor kontrolünü, Paralel Eksen Teoremi’ne dayalı dinamik atalet analizlerini ve tepki tekeri eğim testlerini tek bir kompakt gövdede buluşturmaktadır.
1D4T’nin en çarpıcı yeniliklerinden biri, yeniden yapılandırılabilir eyleyici (aktüatör) mimarisidir. Sistem yönelim kontrolünü tepki tekerlekleri ile sağlamaktadır. Ancak bu tekerlekler sabit bir eksende kalmak zorunda değildir; istenildiği takdirde tepki tekerinin açısı mekanik olarak değiştirilerek, gerçek uzay görevlerinde karşılaşılan gelişmiş piramit yapılara ve farklı ortogonal konfigürasyonlara dönüştürülebilmektedir. Bu benzersiz esneklik sayesinde mühendisler, farklı donanım kurulumlarına ihtiyaç duymadan birden fazla ADCS stratejisini aynı platform üzerinde doğrulama imkanı bulur.
Hardware-in-the-loop (HIL) test altyapısı için eksiksiz bir çözüm sunan 1D4T; yüksek çözünürlüklü 16-bit PWM kontrollü özel tasarım sürücü katmanı, hassas IMU sensörleri, USB Type-C ve kablosuz haberleşme seçenekleri ile gerçek zamanlı veri akışı sağlar. Doğrudan birçok yazılım entegrasyonuna sahip olan sistem, PC ve mobil cihazlarla uyumlu kullanıcı arayüzü (GUI) sayesinde modern kontrol algoritmaları geliştirilme ve test edilme süreçlerini kolaylaştırır.
Algoritmalarınızı Gerçek Donanımla Test Edin
Geliştirdiğiniz yönelim kontrol algoritmalarını bilgisayar simülasyonlarında bırakmayın. SPACROL 1D4T Tek Eksen Yönelim Kontrol Test Cihazı ile matematiksel modellerinizi fiziksel donanım üzerinde (HIL) yüksek hassasiyetle doğrulayın ve sistem dinamiğini gerçek zamanlı analiz edin.
2.2. Manyetik Simülatörler: Helmholtz Kafesleri ve NASA Tesisleri
Manyetik torklayıcıların ve manyetometrelerin doğrulanması için, Dünya’nın ve uydunun bulunacağı yörüngenin (örneğin LEO) manyetik alanının yeryüzü laboratuvarında aslına uygun olarak sentezlenmesi gerekir. Bu işlem, genellikle hava yatağını çevreleyen devasa “Helmholtz Kafesleri” (Helmholtz Cages) ile yapılır[76]. Üç eksende dik olarak konumlandırılmış dev bobin çiftlerinden oluşan bu sistemler, bilgisayar kontrollü akımlarla çalışır. Sensör testleri için öncelikle bulundukları odanın mevcut Dünya manyetik alanını tamamen iptal ederler (sıfırlarlar), ardından uydunun yörünge modeli üzerinden LEO’da saniyeden saniyeye değişen manyetik akı çizgilerini dinamik olarak simüle ederler. Özel olarak geliştirilebilir olan Helmholtz Kafesleri istenildiği durumda SPACROL tarafından sağlanabilir.
Manyetik test mühendisliğinin tarihi ve küresel çapta en prestijli yapısı, Maryland’de bulunan NASA Goddard Uzay Uçuş Merkezi Uzay Aracı Manyetik Test Tesisi’dir (Spacecraft Magnetic Test Facility). 1966 yılında inşa edilen bu efsanevi bina, 1985 yılında Ulusal Tarihi Simge (National Historic Landmark) statüsü kazanmıştır. Tesisin binası, dışarıdan veya binanın kendisinden kaynaklanabilecek manyetik parazitleri önlemek amacıyla tamamen manyetik olmayan malzemelerden (ahşap ve alüminyum çiviler kullanılarak) inşa edilmiş ve merkeze giden elektrik hatlarından uzakta, ormanlık bir alanın içine izole edilmiştir.
Binanın içerisinde, standart bir Helmholtz kafesinden daha üstün olan ve 4 adet devasa sarmaldan oluşan 3 eksenli Braunbek Bobin Sistemi bulunmaktadır. Yaklaşık 13 metre (42-foot) çapındaki bu devasa bobin sistemi, Dünya’nın manyetik alanını sıfırlayarak merkezinde 1.8 metrelik son derece stabil (yarım nanotesla stabilitesinde) “manyetik açıdan tamamen sessiz” küresel bir çalışma hacmi yaratır. Uzay yarışının ilk yıllarından itibaren, Apollo programı Ay Taşıtları’ndan (Lunar Rover) devasa iletişim uydularına, modern Mars görevlerinden günümüzün nanouydularına kadar yüzlerce uzay aracının manyetometre kalibrasyonu bu eşsiz Braunbek bobinleri sayesinde gerçekleştirilmiştir. Tesis aynı zamanda uydunun tamamen enerjilendirilmiş haldeyken kendi elektronik devrelerinden uzaya ne kadar manyetik parazit (manyetik dipol momenti) yaydığını ölçerek bu parazitlerin sınırlandırılmasında görev alır[84-88].
3. Genel Değerlendirme ve Gelecek Perspektifleri
Yönelim Belirleme ve Kontrol Sistemleri (ADCS), Explorer 1’in tek boyutlu takla sönümleme çabalarından Hubble Teleskobu’nun ark-saniye hassasiyetli vizyonuna; Apollo dönemi mekanik jiroskoplarından, akıllı telefon işlemcileri boyutlarındaki modern CubeSat modüllerine kadar benzersiz bir gelişim süreci izlemiştir. Yörüngenin karakteristik yapısına (LEO’da atmosferik sürtünme, GEO’da güneş radyasyon basıncı) göre uyarlanan bu sistemler, uzay aracı platformlarının uzaydaki otonom hayatta kalma ve görev icra etme yeteneğinin belkemiğidir.
Geleneksel PD, PID ve LQR temelli yaklaşımlar, uzay araçlarının yönelim kontrolünde uzun yıllar temel dayanak noktası olmuştur. Ancak uzayın öngörülemez doğası, dış bozucu torklar, eyleyici kısıtları ve lineer olmayan uydu dinamikleri, ADCS’yi mühendisliğin en zorlu ve halen hızla gelişmekte olan araştırma alanlarından biri yapmaktadır. Bu karmaşık problemlerin üstesinden gelmek için, yapay zeka destekli hibrit mimarilerin uçuş bilgisayarlarına entegrasyonu, ADCS teorisinin geleceğini şekillendirmektedir. Gelişen teknolojiyle birlikte uzay görevlerinde faaliyet gösterecek uyduların, her türlü çevresel bozucu torkların üstesinden gelebilecek yapay zeka destekli otonom ADCS mimarileri ile donatılmaya devam edileceği açıktır.
Teorik algoritmaların uzaya ulaşmadan önce NASA’nın tarihi Braunbek bobinlerinde, Helmholtz kafeslerinde ve küresel hava yataklarında test edilerek donanımla birleştirilmesi, uzay endüstrisinde hatanın kabul edilmediğini göstermektedir. Matematiksel olarak kusursuz görünen yeni nesil yapay zeka algoritmalarının gerçek dünyadaki donanım gecikmeleri ve fiziksel anomalilerle nasıl başa çıkacağını görmek ancak yüksek hassasiyetli fiziksel simülasyonlarla mümkündür. İşte tam bu noktada, yazılım ile yörünge gerçekliği arasındaki boşluğu doldurmak için SACSTOR gibi üst düzey Donanım Döngüde (HIL) test platformlarına ihtiyaç duyulmaktadır.
SACSTOR, uzay ortamının sürtünmesiz dinamiğini yeryüzünde en az kusurla yaratarak, geliştirilen en karmaşık kontrol mimarilerinin bile güvenle doğrulanmasını sağlayabilmektedir. Kısacası SACSTOR, modern uzay çalışmalarında yörüngedeki başarısızlık riskini donanım düzeyinde minimize ederken, geleceğin yapay zeka destekli bağımsız uydu teknolojilerinin çok daha hızlı ve düşük maliyetle geliştirilmesinin önünü açarken; mühendislik eğitimi noktasında öğrencilere önemli fırsatlar sunmaktadır.