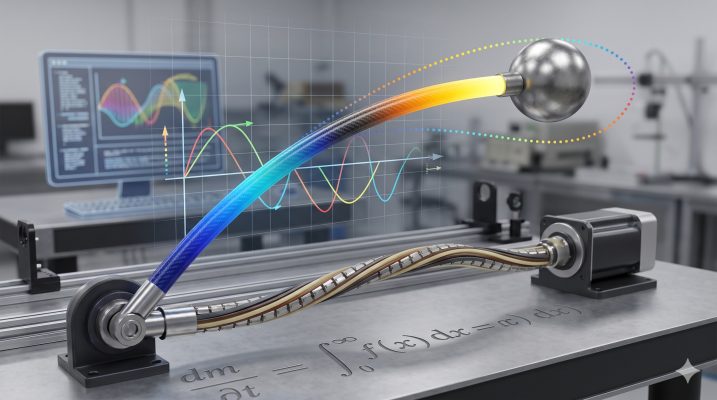
Mathematical Modeling and Simulation of a Flexible Shaft-Flexible Link System with End Mass
Bu çalışmada, esnek bir mil tarafından tahrik edilen, uç kütlesine sahip tek uzuvlu esnek bir robotik kolun hareket denklemi Hamilton prensibi kullanılarak elde edilmiştir. Fiziksel sistem sürekli bir sistem olarak ele alınmıştır.
Read More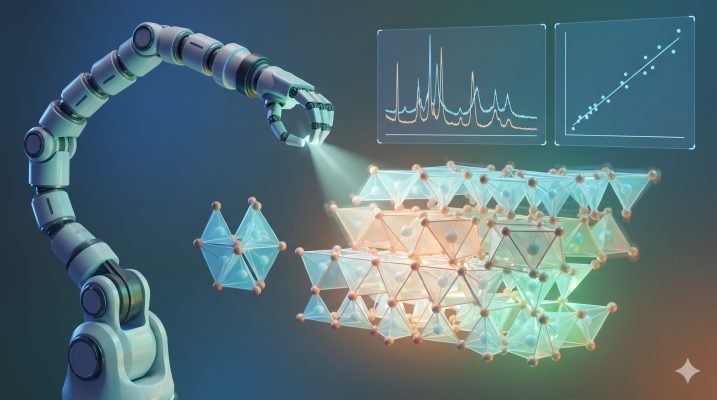
Vibration Control of an Elastic Manipulator Link
Kristal yapı analizinde kullanılan R faktörleri, kil mineralleri ile bağlantılı olarak, türleri zaten bilinen kusurların miktarını belirlemek için de kullanılabilir. Bu amaçla, özdeş katmanlara sahip kaolinitin birim hücre parametreleri kullanılarak, sadece +b/3 ötelemeli istifleme hataları içeren değişken parametreli bir model temelinde (02, 11) ve (20, 13) kırınım bantları hesaplanmıştır.
Read More