İçindekiler
1. Yönelim Kontrolünün Tarihsel Evrimi
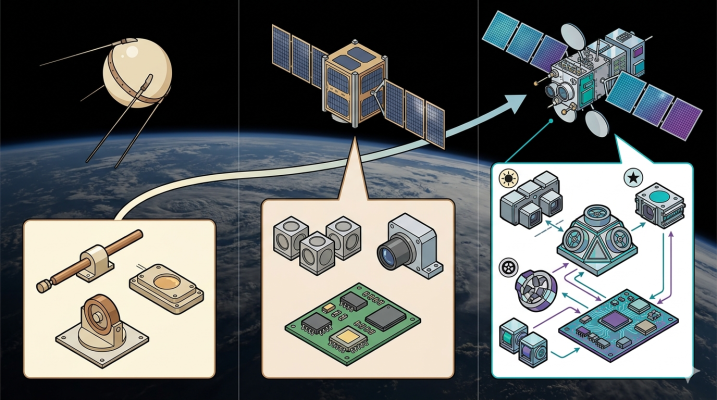
Yönelim belirleme ve kontrol teknolojileri, uzay çağının başından günümüzün takımuydu (constellation) konseptlerine kadar olağanüstü bir mühendislik evrimi geçirmiştir. Uzay keşfinin erken dönemlerinde, sistem karmaşıklığını ve potansiyel arıza noktalarını en aza indirmek birincil öncelikti. 1957 yılında Sovyetler Birliği tarafından fırlatılan Sputnik 1 ve onu 1958’de takip eden ABD’nin ilk uydusu Explorer 1 gibi öncü araçlar, aktif bir yönelim kontrol mekanizmasından yoksundu ve uzayda serbestçe dönmekteydiler [17].
Bu kontrolsüzlüğün yarattığı operasyonel kısıtlamaları aşmak için benimsenen ilk sistematik yaklaşım “spin stabilizasyonu” olmuştur [8]. Spin stabilizasyonu, uzay aracının silindirik veya simetrik gövdesinin, tıpkı bir topaç gibi kendi ekseni etrafında dakikada 50 ila 100 devir (rpm) hızla döndürülmesi prensibine dayanır [23]. Dönüş hareketinin yarattığı açısal momentum, Newton mekaniği gereği jiroskopik bir rijitlik (gyroscopic stiffness) oluşturarak dönüş ekseninin uzayda sabit kalmasını sağlar. Pioneer 10 ve 11, Lunar Prospector ve Galileo Jüpiter yörünge aracı gibi tarihi görevlerde başarıyla uygulanan bu yöntem, minimum hareketli parça ile yüksek stabilite sunduğu için uzun yıllar boyunca standart olarak kabul edilmiştir [8]. Ancak spin stabilizasyonunun temel bir zafiyeti bulunmaktaydı: Aracın gövdesi sürekli döndüğü için, dış yüzeye monte edilmiş güneş panelleri ve kameralar hedeflerini yalnızca dönüş periyotlarının küçük bir anında, adeta bir deniz feneri gibi tarayarak görebiliyordu [24].
Erken dönem uyduların yönelim ekseninin Dünya’dan kontrol edilebilmesine yönelik ilk büyük adımlar 1960’larda atıldı. 1960 yılında fırlatılan TIROS II meteoroloji uydusu, spin eksenini yönlendirmek için manyetik tork üreteçlerini kullanan öncü bir sisteme sahipti. Uydunun dış çeperine sarılmış iletken bir bobinden geçirilen elektrik akımının yönü, Güneş ve ufuk sensörlerinden alınan verilere dayanılarak yer istasyonundan gönderilen komutlarla değiştiriliyor; oluşturulan bu yapay manyetik alanın Dünya’nın manyetik alanıyla etkileşime girmesi sonucu uydunun spin ekseni (spin axis) istenen konuma presesyon (yalpalama) hareketiyle yönlendiriliyordu. Hughes Aircraft Company tarafından patenti alınan bu yenilikçi konsept, yönelim kontrolünde devrim yaratmıştır [26]. Modern uzay operasyonlarının temelini oluşturan paradigma değişikliği ise, gövdenin uzayda tamamen sabit tutulduğu “üç eksenli stabilizasyon” (3-axis stabilization) konseptine geçiş olmuştur. Bu alandaki tarihi dönüm noktası, NASA tarafından 1974 yılında fırlatılan Applications Technology Satellite 6 (ATS-6) görevidir. ATS-6, Yer-Sabit yörüngede (GEO) üç eksenli stabilizasyona sahip ilk uzay aracı olarak tarihe geçmiştir [28]. 930 kilogramlık kütlesi ve 9 metrelik parabolik anteni ile ATS-6, spin hareketini terk ederek antenini ABD’nin kırsal kesimlerine ve Hindistan’daki SITE (Satellite Instructional Television Experiment) projesine benzeri görülmemiş bir hassasiyetle kilitleyebilmiş; böylece doğrudan eve yayın (direct broadcast) ve tele-eğitim konseptlerinin fizibilitesini kanıtlamıştır [29]. ATS-6’nın bu başarısı, meteoroloji uydularında da radikal bir tasarımsal değişime yol açmış; spin stabilizasyonlu GOES A-C uydularının (Dünya’yı sadece %10 oranında görüntüleyebilen) yerini, 1994 yılında fırlatılan GOES-8 ile birlikte üç eksenli stabilize edilen ve Dünya’yı %100 oranında, kesintisiz olarak eşzamanlı görüntüleme ve sondaj (sounding) yapabilen yeni nesil GOES uyduları almıştır [24].
National Environmental Satellite, Data, and Information Service [24]
21. yüzyıla gelindiğinde, mikro-elektro-mekanik sistemlerdeki (MEMS) atılımlar ve ticari elektronik bileşenlerin (COTS) uzay kalifikasyonuna uyarlanması, “Küçük Uydu” (SmallSat) ve “Küp Uydu” (CubeSat) devrimini başlatmıştır [33]. NASA Ames Araştırma Merkezi’nin öncülük ettiği ve Aerospace Corporation’ın AeroCube serisi ile olgunlaşan bu süreçte, eskiden yüzlerce kilogramlık uydulara özgü olan yıldız izleyiciler ve reaksiyon tekerleri gibi karmaşık ADCS donanımları, 1U (10x10x10 cm) gibi küçük hacimlere sığdırılabilmiştir. 2012 yılında fırlatılan AeroCube-4, 1U form faktöründe üç eksenli yönelim kontrolü sağlayabilen ilk CubeSat olarak, küçük uyduların sadece akademik oyuncaklar olmadığını, ticari ve askeri hassas gözlem görevlerini de yürütebileceğini kanıtlamıştır. [35] Günümüzde NASA’nın “Small Spacecraft Technology State-of-the-Art” raporları, ADCS donanımlarının geldiği noktayı belgelemekte; Mars Cube One (MarCO) gibi gezegenler arası CubeSat görevlerinin, otonom yönelim kontrol sistemleri sayesinde derin uzay iletişim rölesi görevlerini nasıl başardığını detaylandırmaktadır [34].
2. Yönelim Belirleme ve Kontrol Sisteminin Donanım Mimarisi
Uzay aracı yönelim belirleme ve kontrol sistemi (ADCS), uydunun “duyu organları” olarak işlev gören sensörler ve “kasları” olarak işlev gören eyleyicilerden (aktüatörlerden) oluşur. Bu bileşenler, yerleşik bilgisayarlarda çalışan kontrol algoritmalarıyla birleştirilerek uydunun görev boyunca hedeflenen oryantasyonunu korumasını sağlar.
2.1. Yönelim Belirleme Algılayıcıları (Sensörler)
Yönelim belirleme (attitude determination), uydunun mevcut oryantasyonunun mutlak veya bağıl referans çerçevelerine (referance frame) göre belirlenmesi sürecidir. Sistem güvenilirliği için genellikle birden fazla sensörün verisi filtrelerle (Kalman Filtresi gibi) birleştirilir (sensor fusion). [1,3]
1. Yıldız İzleyiciler (Star Trackers): Modern ADCS mimarisinin en hassas mutlak yönelim sensörleridir. Optik kamera sistemi kullanarak gökyüzünün yüksek çözünürlüklü dijital bir fotoğrafını çeker. Uçuş yazılımı, görüntüdeki yıldız desenlerini ve parlaklıklarını (magnitude) uydunun hafızasındaki yıldız kataloğu ile algoritmik olarak eşleştirir. Bu işlem, uydunun ataletsel referans sistemindeki (inertial frame) 3 eksenli yönelimini birkaç ark-saniye (arc-sec) hata payıyla verebilir.
2. Güneş Sensörleri (Sun Sensors): Uzay aracının yönelimini Güneş vektörüne göre belirler. “Kaba Güneş Sensörleri” (Coarse Sun Sensors – CSS), temel olarak ışığın şiddetini ölçen fotodiyotlardan oluşur ve uydunun Güvenli Mod durumlarında Güneş panellerini enerji kaynağına yönlendirmek için kullanılır. “Hassas Güneş Sensörleri” (Fine Sun Sensors – FSS) ise dar bir görüş alanında derece altı doğruluklar sunan daha gelişmiş optik detektörlerdir.
3. Manyetometreler (Magnetometers): Uydunun bulunduğu noktadaki yerel manyetik alanın yönünü ve şiddetini ölçerler. Tipik olarak akı geçitli (fluxgate) manyetometreler kullanılır. Ölçülen bu vektör, uydunun bilgisayarındaki IGRF veya WMM (World Magnetic Model) gibi Dünya manyetik alan modelleriyle karşılaştırılarak kaba veya orta ölçekte yönelim tahmini yapılır. Yalnızca LEO uyduları için etkilidir ve uydunun kendi elektronik donanımlarından yayılan elektromanyetik gürültüden etkilenebilirler.
4. Jiroskoplar ve Ataletsel Ölçüm Birimleri (Gyroscopes & IMUs): Mutlak bir yön göstermek yerine, uydunun “açısal hızını” (angular rate) ölçen bağıl sensörlerdir. Ufuk veya yıldız sensörlerinin veri sağlayamadığı aralıklarda (örneğin uydunun Dünya’nın gölgesine girmesi durumunda) yönelim verisinin sürekli olarak entegre edilerek tahmin edilmesini sağlarlar. Geleneksel mekanik jiroskopların yerini, ağırlık ve güç avantajları nedeniyle Fiber Optik Jiroskoplar (FOG) ve MEMS jiroskopları almıştır. Jiroskopların zaman içinde biriken kayma (bias drift) hataları, yıldız izleyicilerden alınan periyodik mutlak ölçümlerle düzeltilebilir.
5. Dünya/Ufuk Sensörleri (Earth Horizon Sensors): Dünya’nın yaydığı kızılötesi ışımayı (genellikle karbon dioksit bandında) algılayarak gezegenin soğuk uzay boşluğu ile olan kesişimini (ufuk çizgisini) tespit eder. Bu veri, nadir (Dünya merkezine doğru) vektörünü hesaplamak için kullanılır.
2.2. Yönelim Kontrol Eyleyicileri (Aktüatörler)
Yönelim kontrolü, yönelim hatasını sıfırlamak üzere uydunun fiziksel olarak döndürülmesidir. Bu döndürme işlemi, Newton’un üçüncü yasası (etki-tepki) ve açısal momentumun korunumu ilkelerine dayanan eyleyicilerle gerçekleştirilir[2].
1. Tepki Tekerleri (Reaction Wheels – RW): 3 eksenli aktif kontrolün belkemiğini oluştururlar. Uydu gövdesine entegre edilen bu tekerlekler, bir elektrik motoru vasıtasıyla hızlandırılır veya yavaşlatılır. Tekerleğin açısal hızı değiştiğinde (ivmelendiğinde), açısal momentumun korunumu yasası gereği, uydu gövdesi zıt yönde dönmeye başlar. Genellikle uydularda bir tane yedek olmak üzere dört adet tepki tekeri bulunur.
2. Manyetik Torklayıcılar (Magnetic Torquers / Torque Rods): İçi manyetik nüveli iletken tel bobinlerdir. Bobinlerden akım geçirildiğinde uzay aracı yapay bir elektromıknatısa dönüşür. Bu manyetik alan, Dünya’nın doğal manyetik alanıyla etkileşime girerek uydunun gövdesinde fiziksel bir tork () yaratır [3]. Ana manevralar için çok yavaş olmalarına rağmen, aerodinamik ve güneş radyasyon torkları nedeniyle tepki tekerlerinde zamanla biriken ve motor hız sınırını aşarak “doyum noktasına” (saturation) ulaşan momentumun, sisteme yakıt harcatmadan Dünya’nın manyetik alanına aktarılarak deşarj edilmesi (momentum dumping / desaturation) için kritik öneme sahiptirler.
3. Kontrol Moment Jiroskopları (Control Moment Gyros – CMG): Sabit ve yüksek hızda dönen devasa rotorların, bir eksen (gimbal) etrafında yönlendirilmesiyle devasa jiroskopik torklar üreten sistemlerdir. Uluslararası Uzay İstasyonu (ISS) veya çok hızlı dönüş (slew) manevrası yapması gereken yüksek çeviklikteki gözlem uydularında kullanılırlar.
4. İticiler (Thrusters): Uzay aracının etrafına yerleştirilmiş nozullardan basınçlı soğuk gaz (cold gas), hidrazin gibi kimyasal yakıtlar veya iyonize edilmiş plazma püskürterek reaksiyon kuvveti yaratırlar. Çok yüksek ve ani tork üretebilirler, ancak yakıt kütlesiyle sınırlı oldukları için yörünge düzeltme ve yörünge bakım operasyonlarına saklanırlar. Ayrıca GEO gibi manyetik alanın zayıf olduğu bölgelerde, tepki tekeri momentum deşarjı için önemli bir yöntemdirler.