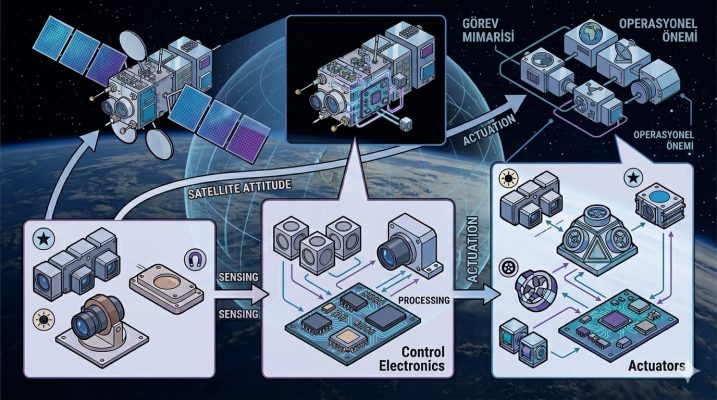
1. Sistemin Operasyonel Önemi ve Görev Mimarisindeki Yeri
Uzay araçları ve yapay uydular, yörüngedeki spesifik görevlerini başarıyla ve güvenli bir şekilde yerine getirebilmek için uzay boşluğundaki konumlarını, açısal hızlarını ve yönelimlerini yüksek doğrulukla bilmek ve bu parametreleri kontrol etmek zorundadır. Bu hayati mühendislik, Yönelim Belirleme ve Kontrol Sistemi (Attitude Determination and Control System – ADCS) adı verilen, gelişmiş sensörler, eyleyiciler (aktüatörler) ve karmaşık matematiksel algoritmaların entegre bir şekilde çalıştığı kapalı çevrim (closed-loop) bir otonom mimari tarafından yürütülmektedir [1]. Bir uzay aracının yönelimi (attitude), aracın kendi gövdesine sabitlenmiş eksen takımının (body frame), uzaydaki ataletsel bir referans sistemine (inertial frame) veya Dünya, Güneş, Ay gibi belirli gök cisimlerine göre sahip olduğu açısal duruşu ifade etmektedir [3].
Bir uzay görevinin başarıya ulaşması, büyük ölçüde ADCS’nin sunduğu yönlendirme hassasiyetine (pointing accuracy) ve stabiliteye bağlıdır [6]. Sistem tasarımı, uydunun taşıdığı faydalı yüke ve iletişim altyapılarının gereksinimlerine göre şekillenmektedir. Örneğin, derin uzay görevlerinde Dünya ile veri iletişiminin kurulup sürdürülebilmesi için uzay aracının antenlerinin (high-gain antenna) kusursuz bir şekilde Dünya’daki yer istasyonlarına hizalanması gerekmektedir [2]. Benzer şekilde, NASA’nın Dünya gözlem uydularından Aqua veya GRACE-FO (Gravity Recovery and Climate Experiment Follow-On) gibi platformların, gezegenin yerçekimi anomalilerini ve iklim değişikliklerinin takibi için bilimsel enstrümanlarını sürekli olarak nadir (Dünya’nın merkezine doğru) yönünde tutmaları şarttır [9]. Astronomik gözlemler gerçekleştiren Hubble Uzay Teleskobu gibi platformlarda ise ADCS’nin önemi çok daha kritik bir boyuta ulaşır. Hubble’ın milyonlarca ışık yılı uzaklıktaki galaksileri bulanıklaşmadan (jitter) görüntüleyebilmesi için 0.007 ark-saniye gibi olağanüstü bir stabilizasyona ihtiyacı vardır; bu hassasiyet, pratik bir ifadeyle, Washington D.C.’de bulunan bir lazer ışınının New York’daki Empire State Binası’ndaki bir madeni paranın üzerine saatlerce sapmadan kilitlenebilmesi anlamına gelmektedir[11].
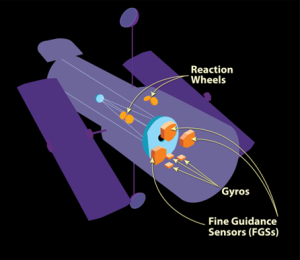
Bu görselde Hubble’ın Pointing Kontrol Sistemi’nin komponentleri etiketlenmiştir.[11]
Yönlendirme işlevinin yanı sıra, ADCS uzay aracının hayatta kalması için gereken termal denge ve enerji yönetiminden de doğrudan sorumludur. Uyduların güneş panellerinin, maksimum elektrik enerjisi üretebilmesi için yörünge boyunca Güneş’i takip etmesi (sun-tracking) gerekir [14]. Aynı zamanda, uzay aracının karanlık ve Güneş gören yüzeyleri arasındaki devasa sıcaklık farklarının hassas elektronik bileşenlere zarar vermemesi için uydunun belirli bir termal yönelimde tutulması veya yavaş bir dönüş hareketi yapması sağlanır[8]. Herhangi bir donanım veya yazılım arızası durumunda uydunun kontrolsüz bir dönüşe (tumbling) girmesi, panellerin Güneş’i görememesine ve bataryaların hızla tükenerek görevin tamamen kaybedilmesine yol açabilir. Bu tür anomaliler tespit edildiğinde, ADCS otonom olarak “Güvenli Mod” (Safe Hold Mode) adı verilen bir hayatta kalma protokolünü devreye sokar. Bu modda, bilimsel yükler gibi kritik olmayan tüm sistemler kapatılır, uzay aracı enerji üretimini maksimize edecek şekilde Güneş’e yönlendirilir ve yer kontrol istasyonundan gelecek kurtarma komutları beklenir. [14] NASA’nın Mars yörüngesindeki MAVEN (Mars Atmosphere and Volatile EvolutioN) aracının Ataletsel Ölçüm Birimi’nde (IMU) yaşanan bozulmalar sonrası güvenli moda geçmesi ve ardından tamamen yıldız izleyici (star tracker) verilerine dayalı yeni bir otonom navigasyon stratejisiyle bilimsel operasyonlarına geri dönmesi, ADCS’nin görev kurtarıcı esnekliğine çarpıcı bir örnektir[19].
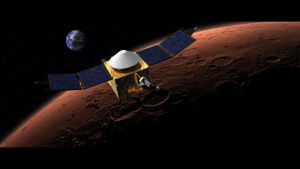
Dünya gezegeninin hayali bir görüntüsüyle birlikte Kızıl Gezegenin yörüngesinde bulunan MAVEN uzay aracını gösterilmektedir. (NASA/GSFC’nin izniyle) [19]