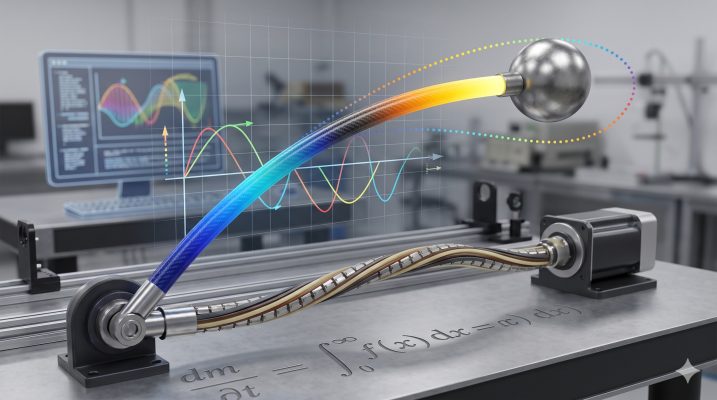
Mathematical Modeling and Simulation of a Flexible Shaft-Flexible Link System with End Mass
In this study, the equation of motion of a single link flexible robotic arm with end mass, which is driven by a flexible shaft, is obtained by using Hamilton’s principle. The physical system is considered as a continuous system. As a first step, the kinetic energy and the potential energy terms and the term for work done by the nonconservative forces are established.
Read More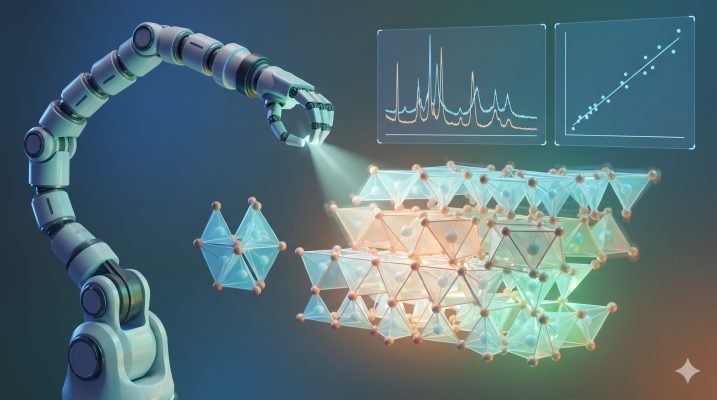
Vibration Control of an Elastic Manipulator Link
The R factors employed in crystal structure analysis can also be used in connection with clay minerals to determine the amount of defects whose types are already known. For this purpose, using the unit-cell parameters of kaolinite with identical layers,(02, 11) and (20, 13) diffraction bands were calculated on the basis of a variable parameter model containing only+ b/3 translational stacking faults.
Read More